
Robot Grasp Validation Classifier
The Shadow Robotics Grasping Dataset provides a set of simulated robotic manipulator grasping trials. Using the Gazebo robotics simulator, over 53,000 experiments were ran, with a total of 992,000 data points. A manipulator with 9 joints (3 fingers, each with 3 joints) was tasked with picking up a sphere from a flat surface, and shaking it. The position, velocity, and torque at each joint was recorded various times throughout the trial.
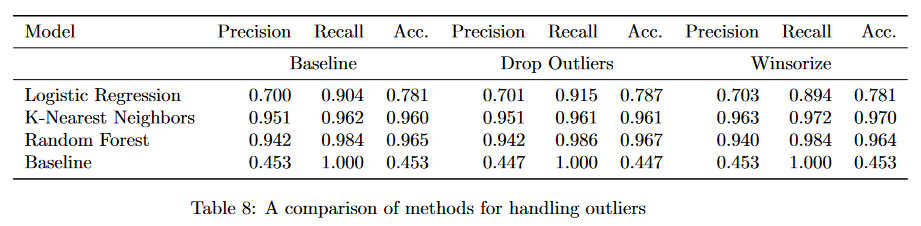
Our goal is to use these features to predict whether the manipulator has a robust grip on the object or if it will drop the object. This has applications in human-robot interaction, where robotic manipulators need to interact in spaces designed for human operation. We evaulate 3 models for this binary classification task, a logistic regression model, a K-nearest neighbors model, and a random forest. Models were provided from sklearn. We also test various data cleaning methods, such as outlier handling and handling IID violations. Many samples in this data set are dependent on one antoher, as they may be measurements of the same experiment at different time steps with the same robustness label.
We achieve 97% accuarcy with our random forest and k-nearest neighbors model when winsorizing to handle outliers, while other models perform marginally worse but still significantly above baseline.
You can see the code for this experiment here.
This project was completed as part of the requirements for AI-539 Machine Learning Challenges in the Real World at OSU.